
GHR25
特長

低騒音、長寿命、シャフトモーター採用の高性能リニア単軸ロボット
- 高推力、高速、高応答、高精度
- シンプル構造で取り付け簡単
- 動力部非接触のため低騒音、長寿命、メンテナンスフリー
基本性能
| 項目 | 単位 | 仕様 | |
|---|---|---|---|
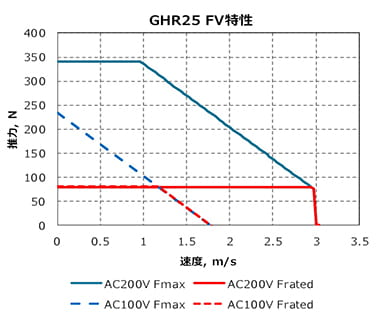
| 定格推力※1 ※2 | N | 80 | |
| 瞬時最大推力※3 | N | 340 | |
| 定格電流※1 ※2 | Arms | 1.2 | |
| 瞬時最大電流 | Arms | 5.1 | |
| 最大可搬重量 | 水平置き | kg | 30 |
| 壁掛 | 15 | ||
| 分解能 | μm | 1(HEIDENHAIN(株)LIDA279) | |
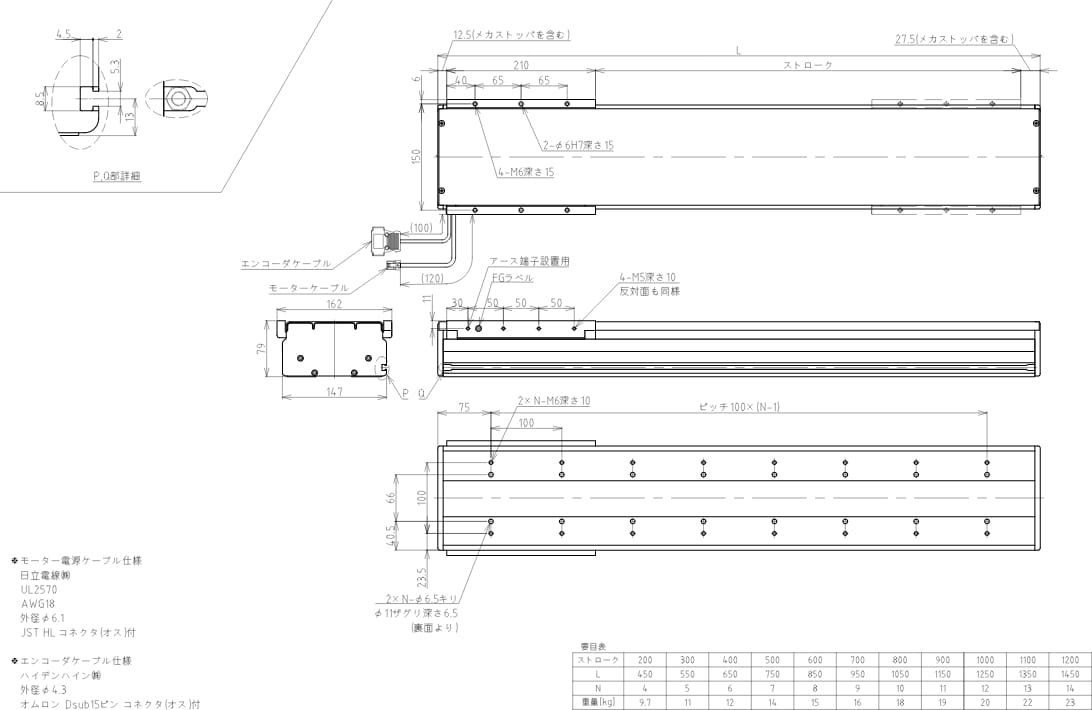
| ストローク※4 | シングルスライダー | mm | 200〜1200(100間隔) |
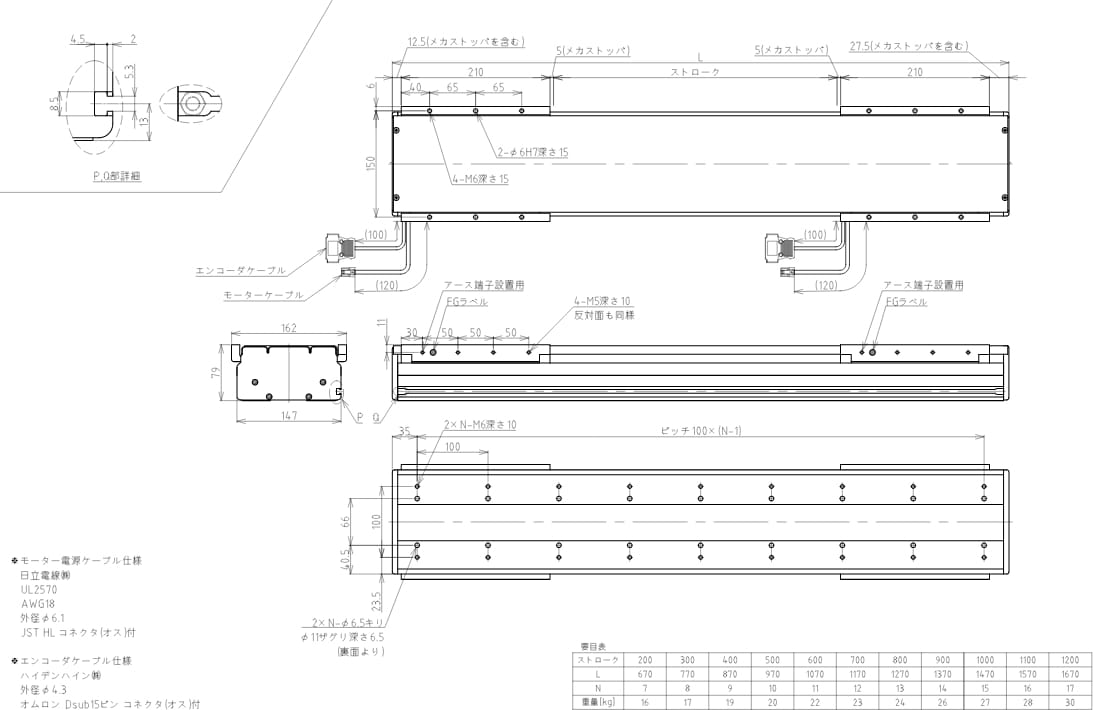
| ダブルスライダー | 200〜1000(100間隔) | ||
| 繰返し位置決め精度 | mm | ±0.5μm | |
※1:室温20℃における仕様となります。可動子内部のコイル表面で昇温110Kとなる値です。
※2:ヒートシンクや放熱板等を装着していない状態での値となります。
※3:使用するアンプにより最大電流値を制限している場合がありますのでご確認ください。
※4:記載内容にないストロークについてはお問合せください。
使用条件
| 項目 | 単位 | 仕様 |
|---|---|---|
| 電源電圧 | V | 100、200 |
| 保存温度 | ℃ | -20〜60 |
| 使用周囲温度 | ℃ | 0〜40 |
| 使用周囲湿度 | % | 20〜80(結露なきこと) |
F-V特性
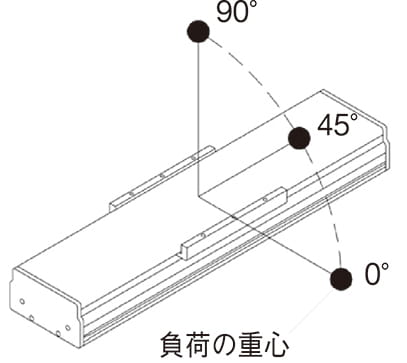
許容オーバーハング量
| 荷重 | 0° | 45° | 90° | |
|---|---|---|---|---|
| 水平置き | 5kg | 1000 | 1000 | 1000 |
| 10kg | 1000 | 800 | 1000 | |
| 15kg | 800 | 650 | 1000 | |
| 20kg | 700 | 580 | 1000 | |
| 25kg | 550 | 500 | 1000 | |
| 30kg | 500 | 450 | 1000 | |
| 壁掛 | 3kg | 1000 | 1000 | 580 |
| 6kg | 1000 | 800 | 450 | |
| 9kg | 1000 | 670 | 400 | |
| 12kg | 1000 | 580 | 350 | |
| 15kg | 1000 | 500 | 300 |
GHR25 シングルスライダー
GHR25 ダブルスライダー
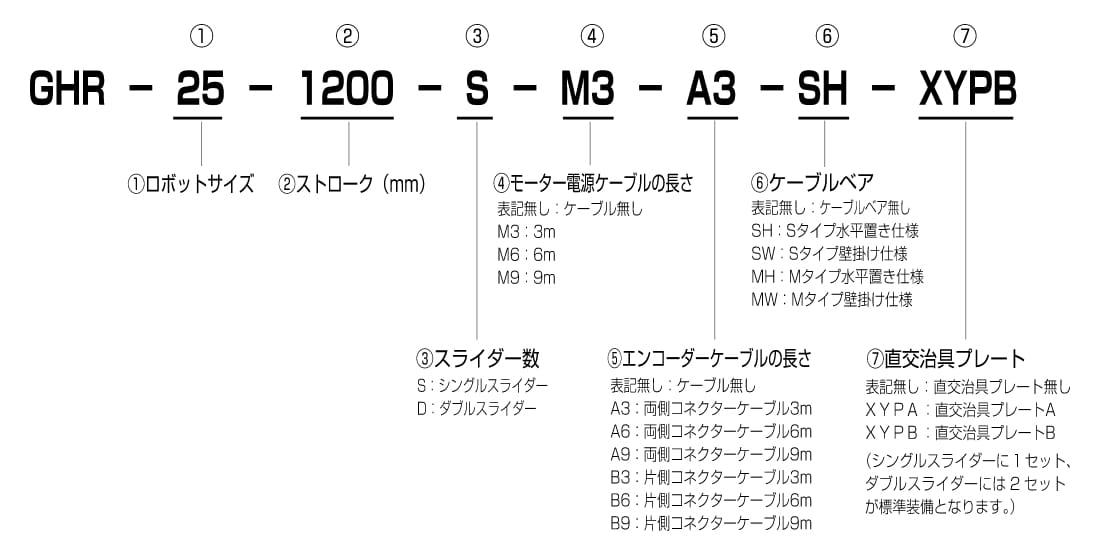
オプション項目
購入時に各項目よりひとつずつ選択いただきます。
| 必須選択項目 | 内容 |
|---|---|
| スライダー数 | S:シングルスライダー D:ダブルスライダー |
| モーター電源ケーブル長さ | M3:3m M6:6m M9:9m |
| リニアスケールコネクタ配置/ケーブル長さ | 英文字:コネクタタイプ A:両側コネクタ B:片側コネクタ 数字:ケーブル長さ 3m,6m,9m 例:A3:両側コネクタケーブル3m |
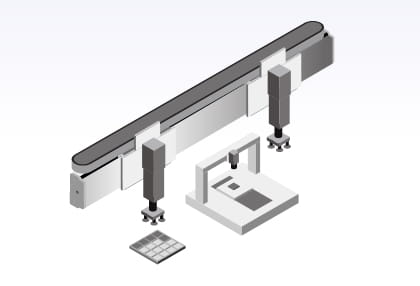
使用例
ローダー/アンローダー
- スライダーは、高速、高精度に独立して動作します。
- マルチスライダーにより、省スペースとコストダウンを実現します。
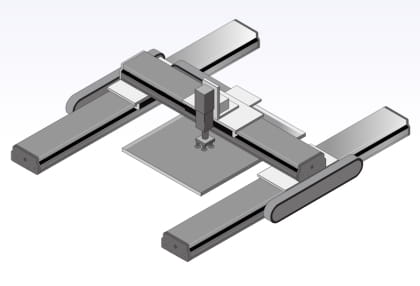
基板搬送装置
- 下軸をパラレル配置とすることで中央スペースにワークを配置することが可能です。
- さらに、シャフトモーターはパラレル運転でもドライバー一台で駆動可能です。
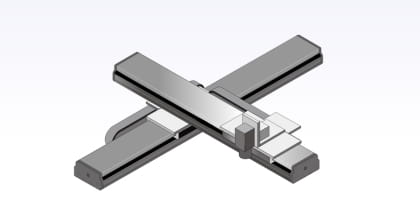
基板の検査装置
- GHR15、GHR25、GHR35の多彩な組み合わせにより、高速、広範囲の動作が可能です。
型式記号(例:GHR25)
設計に関する確認事項
設計に関する確認事項につきましてはこちらをご覧ください。
使用に関する注意事項
使用に関する注意事項につきましてはこちらをご覧ください。